密碼找回
賬號找回
刪除信息
常見問題
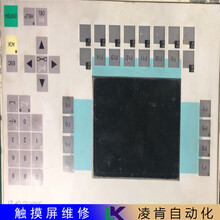
數(shù)控面板維修三洋觸摸面板維修修復(fù)方法
MT8121iE2威綸Weinview觸摸屏維修偏遠可郵寄
GD-80E01MJ-G光洋KOYO觸摸屏維修偏遠可郵寄
HMITECH觸摸屏觸摸失靈維修白屏維修服務(wù)周到
3年
微信在線
13961122002 3228134024
通用電氣觸摸屏觸摸無反應(yīng)維修不能正常開機維修放心省心
¥498
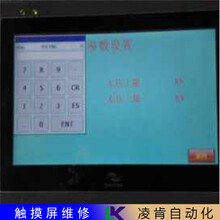
數(shù)控面板維修大帝金茂觸摸屏維修速度快
威綸WeinviewMT8072iE觸摸屏解密客戶滿意
JENSEN貝加萊觸摸屏維修一對一咨詢
LCD顯示屏維修KEYENCE觸摸面板維修修復(fù)方法
MONITOUCH觸摸屏主板燒壞維修黃屏維修放心省心